一些前置知识
并、串行通信的区别
并行通信
串行通信
传输原理
数据各个位同时传输
数据按位顺序传输
优点
速度快
占用引脚资源少
缺点
占用引脚资源多
速度相对较慢
串行通信的分类
(*)1、按照数据传送方向,分为:
单工:数据传输只支持数据在一个方向上传输;
(***) 2、按照通信方式,分为:
同步通信 :带时钟同步信号传输。比如:SPI,IIC通信接口。异步通信 :不带时钟同步信号。比如:UART(通用异步收发器),单总线。
在异步通讯中不使用时钟信号进行数据同步,它们直接在数据信号中穿插一些用于同步的信号位,或者将主题数据进行打包,以数据帧的格式传输数据。通讯中还需要双方规约好数据的传输速率(也就是波特率)等,以便更好地同步。常用的波特率有4800bps、9600bps、115200bps等。
在同步通讯中,数据信号所传输的内容绝大部分是有效数据,而异步通讯中会则会包含数据帧的各种标识符,所以同步通讯效率高,但是同步通讯双方的时钟允许误差小,稍稍时钟出错就可能导致数据错乱,异步通讯双方的时钟允许误差较大。
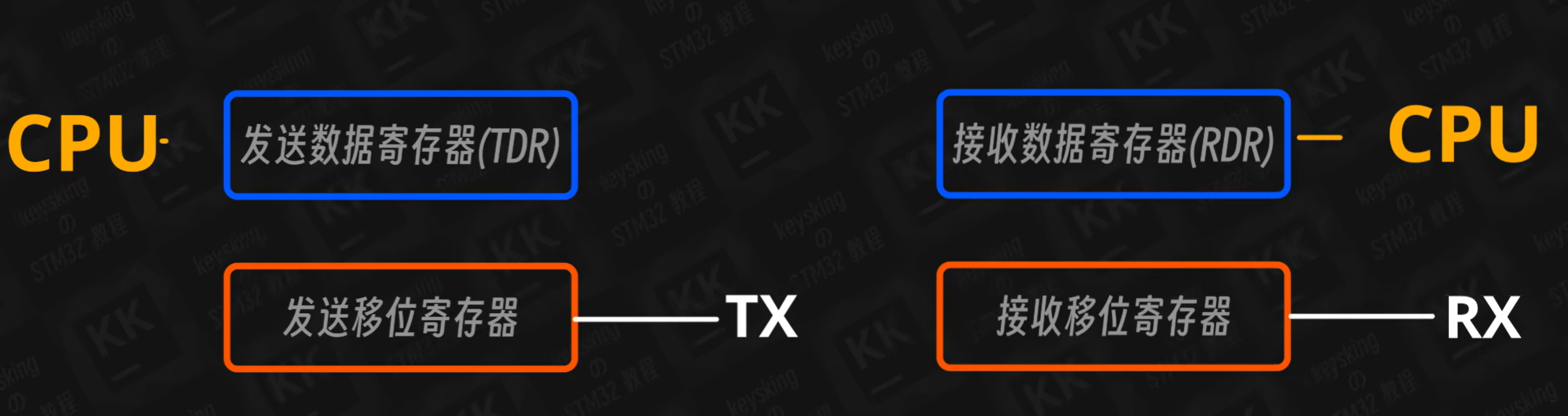
三种串口通信方式
轮询方式
特点:发一个,接受一个。
缺点:占用cpu,利用率较低。
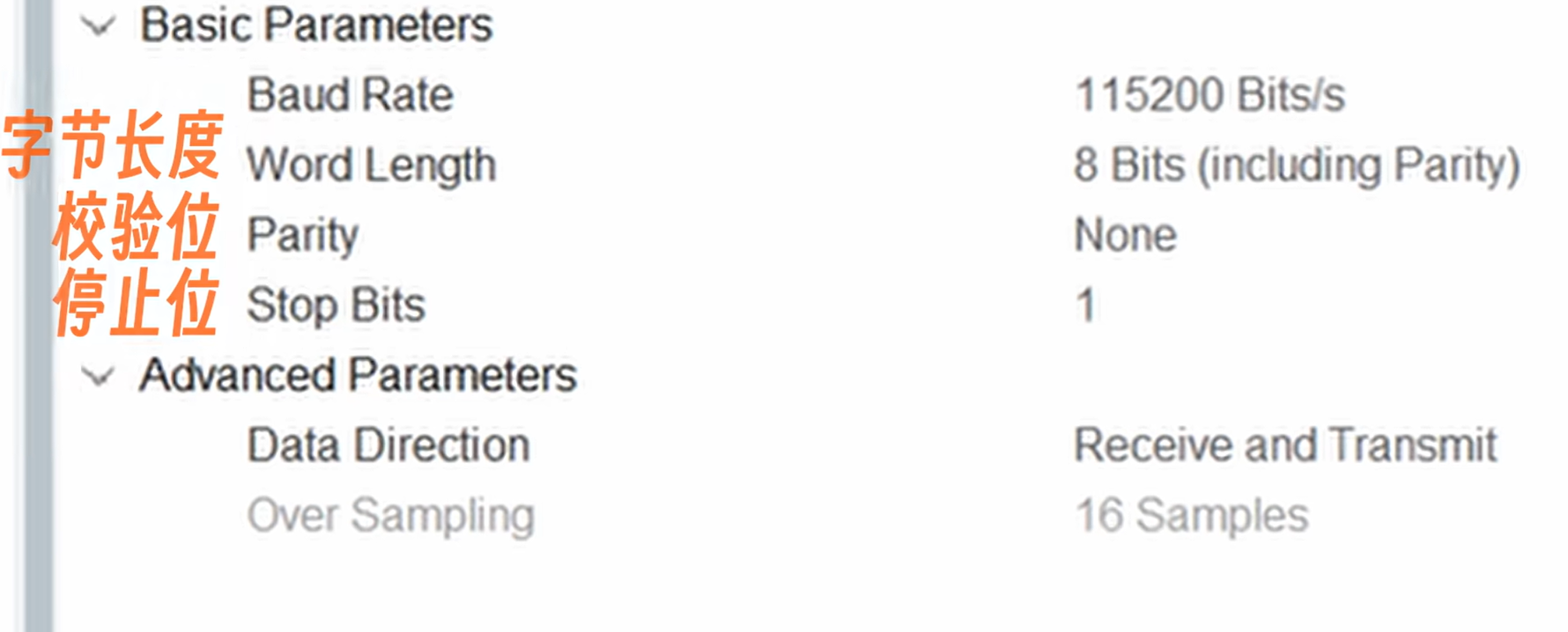
波特率:常见的用115200,9600Bits/s。需要保证接收端和发送端波特率一致 。
字节长度:8字节,外加前面1位起始位,后面1位结束位,一共10位。
轮询模式代码
主要用到的hal库函数如下:
1 2 3 4 5 HAL_UART_Receive(&huart1,receveData,2,HAL_MAX_DELAY); //接收,第一位为串口地址,第二位为指针,第三位为数组长度,第四位为等待最大时长(HAL_MAX_DELAY为无限制时长) HAL_UART_Transmit(&huart1,receveData,2,100); //发送,第一位为串口地址,第二位为指针,第三位为数组长度,第四位为等待最大时长(HAL_MAX_DELAY为无限制时长)
代码实践
通过轮询模式实现串口收发数据:
实践一:实现收发“Hello World”
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 ... char message[]="Hello World" /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ HAL_UART_Transmit(&huart1,(uint8_t*)message,strlen(message),100); //char强转为uint8_t类型 HAL_Delay(1000); } /* USER CODE BEGIN 3 */ }
实践二:实现发送对应信息,点亮对应小灯
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 ... uint8_t receveData[2]; /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ HAL_UART_Receive(&huart1,receveData,2,HAL_MAX_DELAY); HAL_UART_Transmit(&huart1,receveData,2,100); if(receveData[1]=='1'&&receveData[0]=='R'){ HAL_GPIO_TogglePin(LED_RED_GPIO_Port,LED_RED_Pin); } if(receveData[1]=='1'&&receveData[0]=='Y'){ HAL_GPIO_WritePin(LED_YELLOW_GPIO_Port,LED_YELLOW_Pin,GPIO_PIN_SET); } if(receveData[1]=='1'&&receveData[0]=='G'){ HAL_GPIO_WritePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin,GPIO_PIN_SET); } //实现对传输信息的接收,并点亮对应的引脚 /* USER CODE BEGIN 3 */ } ...
中断模式
和轮询类似,只是CPU在寄存器空闲时可以处理其他事情。大致原理如下:
transmit发送和轮询一样,而receive接收,由于不会等待,所以在回调函数中书写相关的代码逻辑。
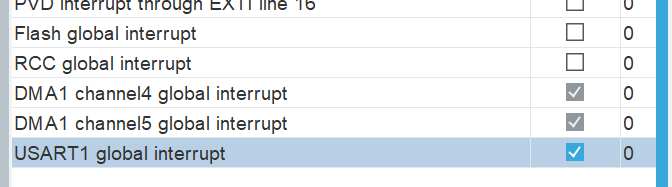
你需要在cubemx中开启全局中断。
中断模式代码
主要用到的hal库函数如下:
1 2 3 4 5 6 7 8 9 __weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { //弱函数,中断回调函数 } HAL_UART_Transmit_IT(&huart1,receveData,2);//第一个为串口,第二个为指针,第三个为数组长度 HAL_UART_Receive_IT(&huart1,receveData,2);//第一个为串口,第二个为指针,第三个为数组长度
代码实践
实践一:与中断的实践二功能相同
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 /* USER CODE BEGIN PV */ uint8_t receveData[2]; /* USER CODE END PV */ ... /* USER CODE BEGIN 0 */ void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)//在中断处理函数中书写代码逻辑 { HAL_UART_Transmit_IT(&huart1,receveData,2); if(receveData[1]=='1'&&receveData[0]=='R'){ HAL_GPIO_TogglePin(LED_RED_GPIO_Port,LED_RED_Pin); } if(receveData[1]=='1'&&receveData[0]=='Y'){ HAL_GPIO_WritePin(LED_YELLOW_GPIO_Port,LED_YELLOW_Pin,GPIO_PIN_SET); } if(receveData[1]=='1'&&receveData[0]=='G'){ HAL_GPIO_WritePin(LED_GREEN_GPIO_Port,LED_GREEN_Pin,GPIO_PIN_SET); } HAL_UART_Receive_IT(&huart1,receveData,2);//每次结束后,开启下一次的接收 } /* USER CODE END 0 */ ... /* USER CODE BEGIN 2 */ HAL_UART_Receive_IT(&huart1,receveData,2);//在main函数中开启接受的中断 /* USER CODE END 2 */
DMA模式
搬运数据,创建通道,等待完成后通过中断处理函数通知cpu。
优点:进一步解放cpu。
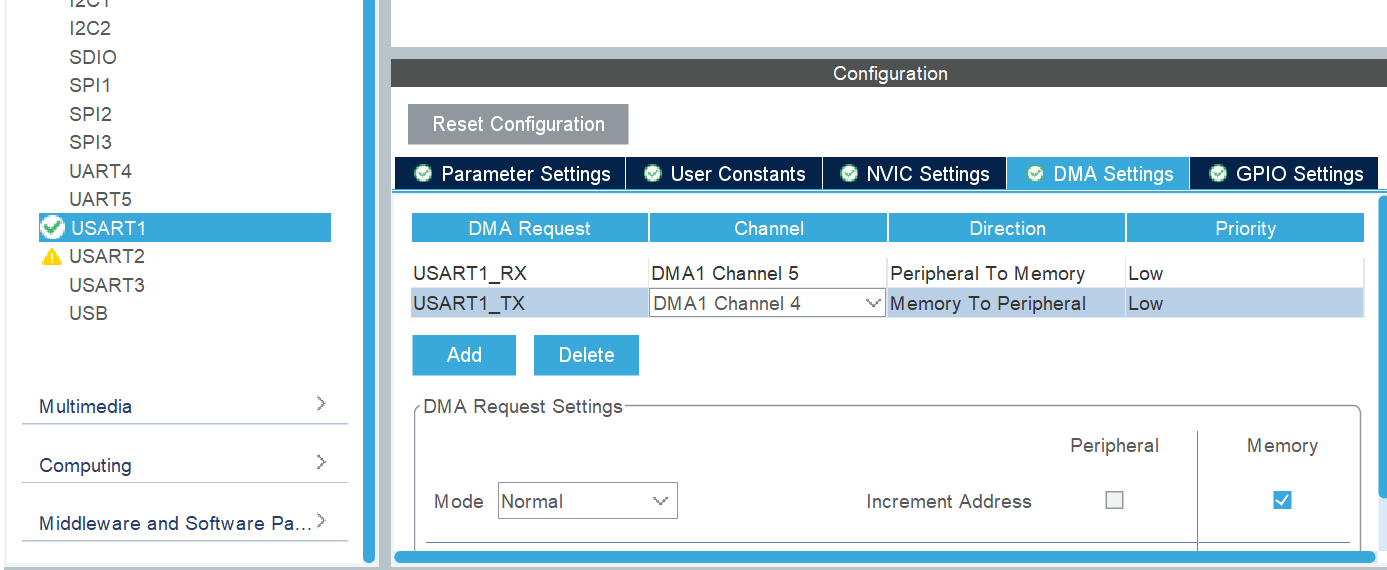
开启DMA:(从左至右,从上至下,顺时针)开启的DMA通道,数据传输方向,优先级(一般默认),接收端和发送端是否地址自增,模式。
DMA模式代码
主要用到的hal库函数如下:
1 2 3 HAL_UART_Transmit_DMA(&huart1,receveData,2);//第一个为串口,第二个为指针,第三个为数组长度 HAL_UART_Receive_DMA(&huart1,receveData,2);//第一个为串口,第二个为指针,第三个为数组长度
实践与上述两种方法类似,略。
实现不定长数据接收
主要用到的hal库函数如下:
1 2 3 4 5 6 7 8 9 10 11 __weak void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size) //所用的中断回调函数 HAL_UARTEx_ReceiveToIdle(&huart1,receveData,sizeof(receveData)); HAL_UARTEx_ReceiveToIdle_IT(&huart1,receveData,sizeof(receveData)); HAL_UARTEx_ReceiveToIdle_DMA(&huart1,receveData,sizeof(receveData)); //第三位是最大接收的长度,不大于数组长度
此方式下DMA的缺点:传输过半中断会触发中断,即发送一半就会截断。
通过取消使能串口,取消中断。如下:
1 2 3 4 5 extern DMA_HandleTypeDef hdma_usart1_rx; //在main.h中进行定义(如果勾选了为每个外设生成单独的.c.h文件) __HAL_DMA_DISABLE_IT(&hdma_usart1_rx,DMA_IT_HT); //第一个为dma的串口,在中断处理函数和main函数中都要添加
不定长数据接收代码
代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 /* USER CODE BEGIN PV */ uint8_t receveData[5]; /* USER CODE END PV */ /* USER CODE BEGIN 0 */ void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size) { if(huart==&huart1) { HAL_UART_Transmit_DMA(&huart1,receveData,Size); HAL_UARTEx_ReceiveToIdle_DMA(&huart1,receveData,sizeof(receveData)); //每次结束后都开启接收 __HAL_DMA_DISABLE_IT(&hdma_usart1_rx,DMA_IT_HT); //取消使能 } } /* USER CODE END 0 */ ... /* USER CODE BEGIN 2 */ HAL_UARTEx_ReceiveToIdle_DMA(&huart1,receveData,sizeof(receveData)); //开启第一次接收 __HAL_DMA_DISABLE_IT(&hdma_usart1_rx,DMA_IT_HT);//取消使能 /* USER CODE END 2 */
主要参考资源
1.【STM32】串口通信基本原理(超基础、详细版)_stm32串口通信工作原理-CSDN博客
2.【keysking的STM32教程】 第8集 STM32的串口通信_哔哩哔哩_bilibili
3.【STM32入门教程-2024】第9集 STM32串口原理与串口中断模式收发 | keysking的stm32教程_哔哩哔哩_bilibili
4.【工作STM32】第10集 STM32串口DMA模式与收发不定长数据 | keysking的stm32教程_哔哩哔哩_bilibili